Quad Zero Kit - Assembly Guide
WARNING
Unmaintained site notice. Information may be outdated. Please visit 3DR documentation instead.
The Quad Zero Kit is a lightweight (<250g) platform with a 3D-printable frame, agile flying envelope with extended flight times yet simple to setup. It is powered by our most popular flight controller yet, the Control Zero H7 OEM on top of custom made motors and a carrier board that includes power monitoring, integrated ESC module, Time-of-Flight sensor for precision landing (Z-axis), and additional ports to support any OSD, GPS, CAN, telemetry and any other payload peripherals.
This kit is perfect as a development platform, educational, or even a light show drone – light and FPV pod coming soon!

We put together this guide to help you get up and running with your QZKit platform as fast as possible. Please note that this build may take anywhere from 3 hrs to several sessions depending on your particular experience.
WARNING
Unmaintained site notice. Information may be outdated. Please visit 3DR documentation instead.
What's Included

Please make sure you have all the parts listed below, if something is missing or you have any questions please do not hesitate to contact us. Spare or extra parts are available individually following the links.
| Qty | Part No. | Description |
|---|---|---|
| 1 | Quad Zero frame | |
| 1 | GPS mount | |
| 4 | 2-56x 3/16 Nylon socket head screws | |
| 2 | 2-56x 1/8 Nylon socket head screws | |
| 4 | MI-2202 | mRo brushless motors |
| 8 | M2x6mm black oxide screws. | |
| 2 | CW/CCW propeller sets | |
| 1 | M10112 | Quad Zero Carrier Board |
| 3 | MRC-0243 | JST-GH 6 to JST-SH 6 cables |
| 1 | BT2.0 pigtail | |
| 2 | ½”x½”x1/10” vibration dampers | |
| 1 | M10059 | Control Zero OEM H7 |
| 1 | SD Card | |
| 1 | Plastic tweezers | |
| 1 | M10038 | Med size SAM GPS |
| 1 | FrSky R-XSR radio receiver | |
| 1 | liion-2s | Quad Zero 2S 4200mAh Battery Pack |
| 1 | XT60-BT2.0 adapter | |
| 1 | Balance port adapter (JST-SH 3 to JST-XH 3) |
If you ordered the optional Dual-Band WiFi Telemetry Radio:
| Qty | Part | Description |
|---|---|---|
| 1 | M10114C | Dual Band WiFi Telemetry radio |
| 1 | Molex WiFi na | |
| 1 | MRC-0291 | JST-SH 4 short cable |
| 1 | MRC-0292 | JST-SH 6 short cable |
Required tools
M1.5 hex driver
M2 hex driver
Hobby knife
CA glue
- Accelerator - optional
Soldering iron
- Solder wire
Double-sided tape - 3M VHB recommended
Prop balancer - optional
Scissors - optional
Extra resources
FrSky D16 protocol compatible transmitter
Ground station - any laptop, tablet or embedded device running Mission Planner or QGC

Step 1 - Attach motors to the frame
Allocate the following materials:
- 12x M2x5mm screws (included inside the motors)
- 4x MI-2202 brushless motors
- Quad Zero frame
Take one MI-2202 brushless motor from its box and make sure the rotor can spin freely. Screw it in place with 3x M2x5mm hex screws with your M1.5 hex driver.
NOTE: Make sure the motor's wires point down the frame's arm. See figure below.

WARNING
Do not use Loctite or other similar fluids as these may damage the plastic integrity over time.
Repeat the above steps for the remaining 3 arms. Due to the nature of the manufacturing process, your frame may have elephant foot artifacts; if this is the case please remove it using a hobby knife to ease motor placement.
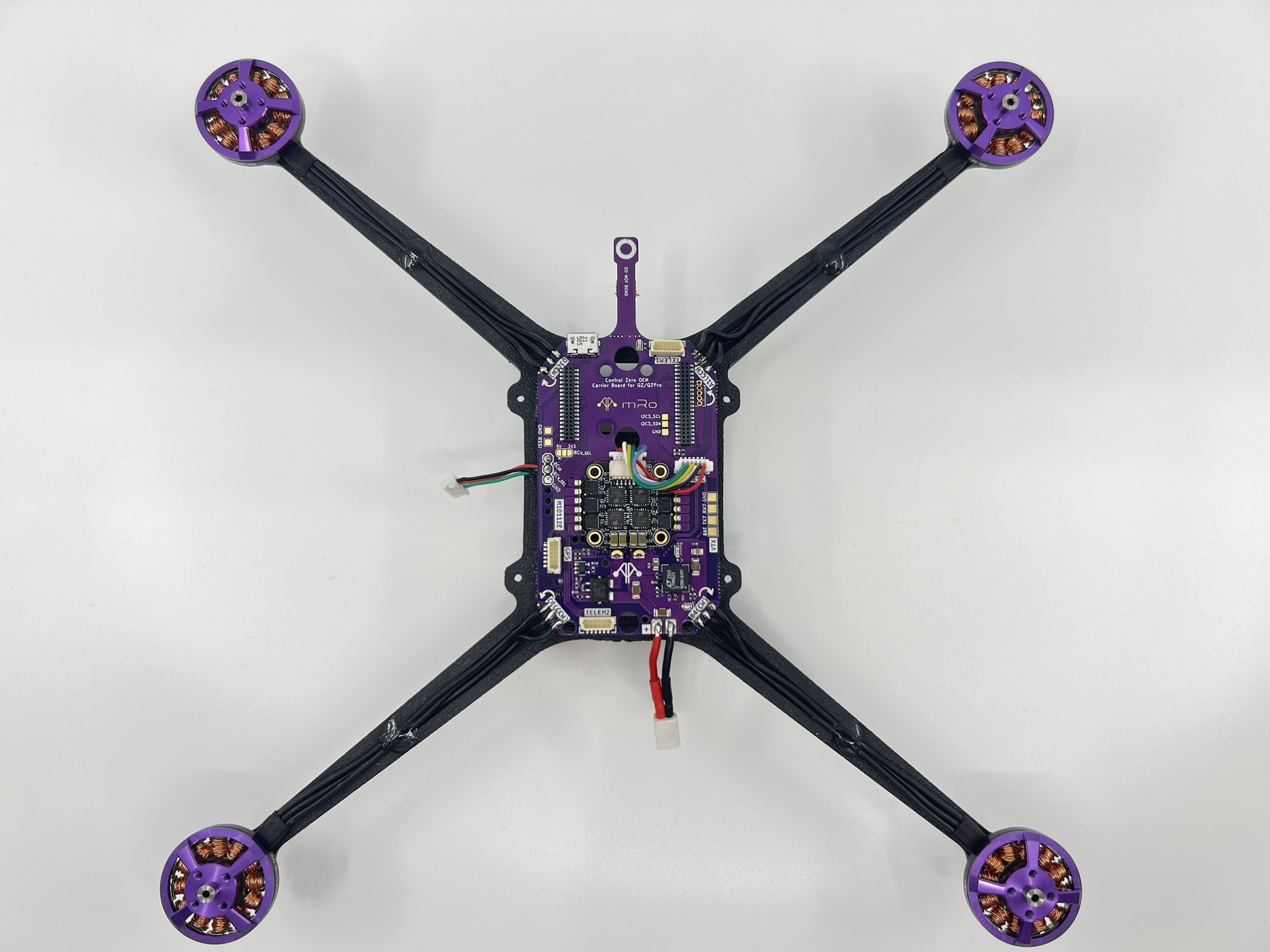
Once you finish placing and screwing all the motors your frame should now look something like the picture below.

Step 2 - Carrier board subassembly
Radio RX wire prep
NOTE: We cannot guarantee the firmware version that FrSky or our distributor ship the receivers with, we understand this situation is not optimal for ease of use and are currently working to solve it.
We chose the R-XSR receiver for its flexibility and low weight. Depending on your particular needs you may choose to place it in a different location or not use one at all. In this guide we will cover the standard RC receiver placed on the side of the frame.
The receiver comes with two cable harnesses. Put away the one with the JR connector as you may use it to flash firmware from the transmitter.
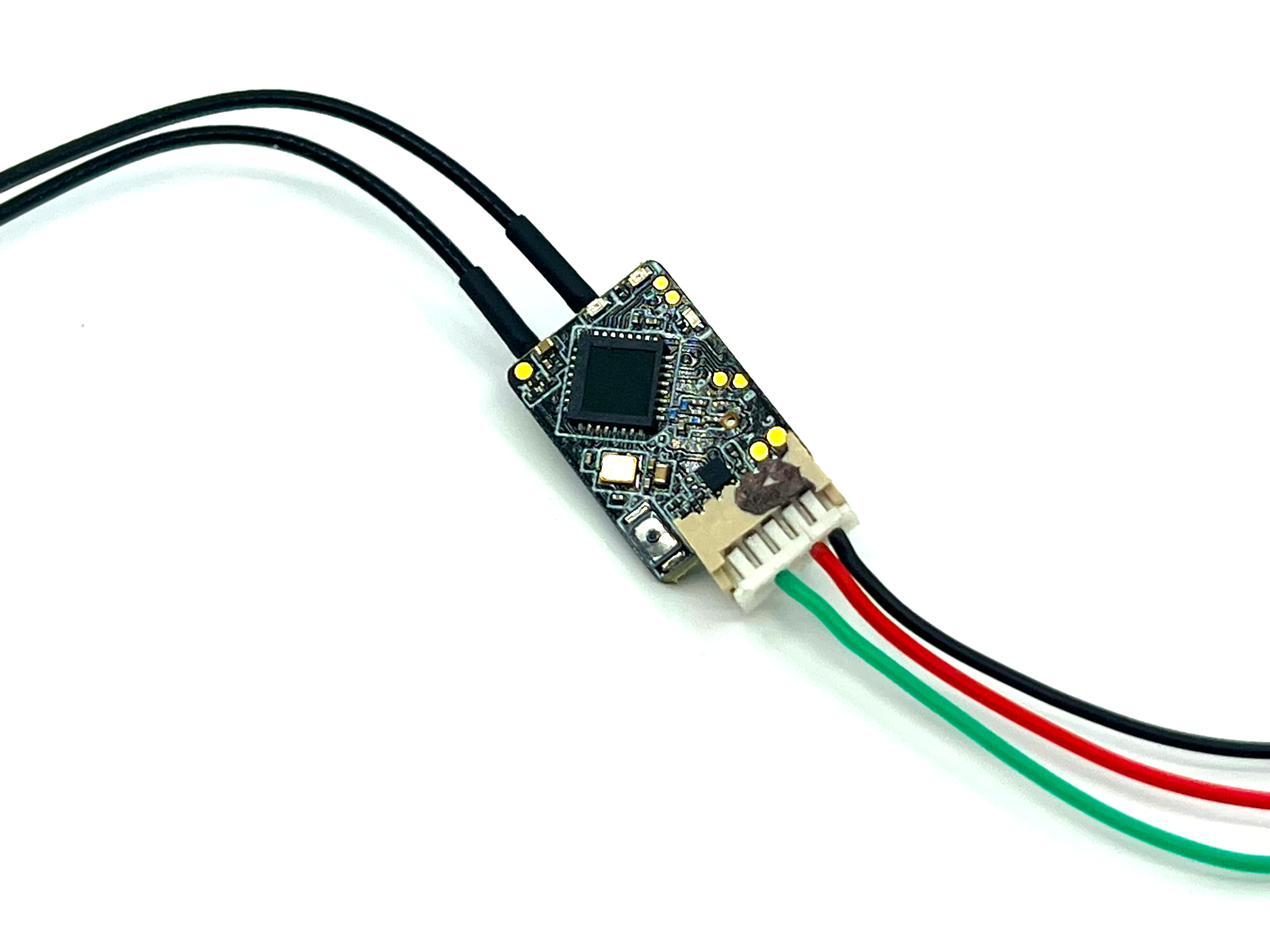
Locate the harness with pre-tinned pigtails and remove the white and yellow wires using some tweezers or hobby knife to pop up the latch of the connector housing.
Make sure your connector assembly looks like the picture below. This shows a standard SBUS out connection to the FC, however if you are an advanced user and would like to use the S.Port for telemetry you may adapt these instructions as needed.
Then, for an appropriate cable management cut the wire length to 26mm or about an inch from the connector housing. Again, if you require to place your radio elsewhere feel free to do so. Now, cut a piece of double sided tape and put in on the antenna connector side of the board, if the tape is too thin you may stack up 2 or more layers, as needed to get a good flat surface area so it sticks better to the frame. Do not place it yet.
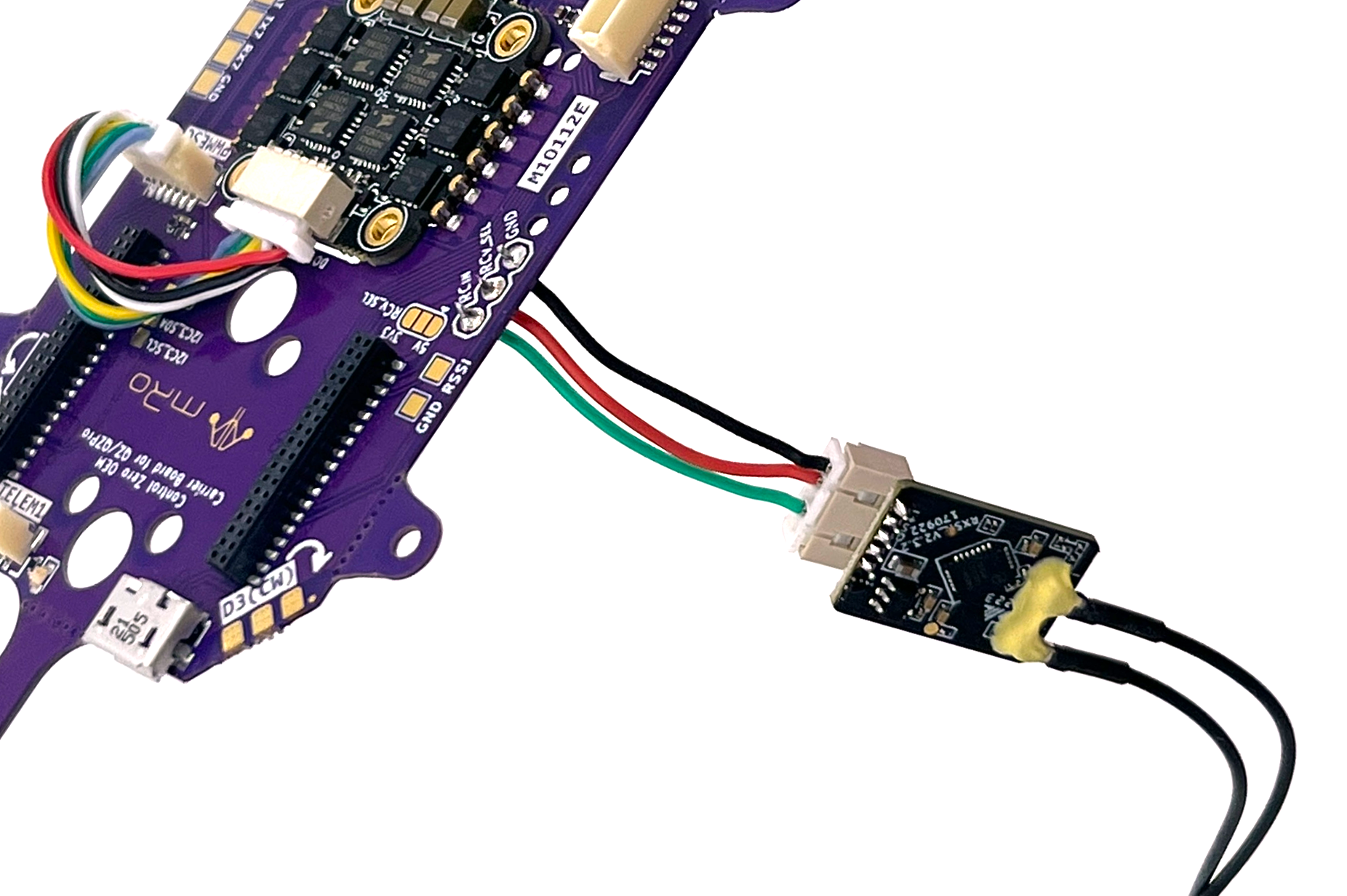
Next, solder the pigtails to the carrier board as described below.
| Color | Carrier pad |
|---|---|
| Black | GND |
| Red | RCV_SEL |
| Green | RCIN |
NOTE: If you are using a Spektrum satellite receiver please visit the M10112 carrier board wiki for directions on how to change the voltage and pairing logic.
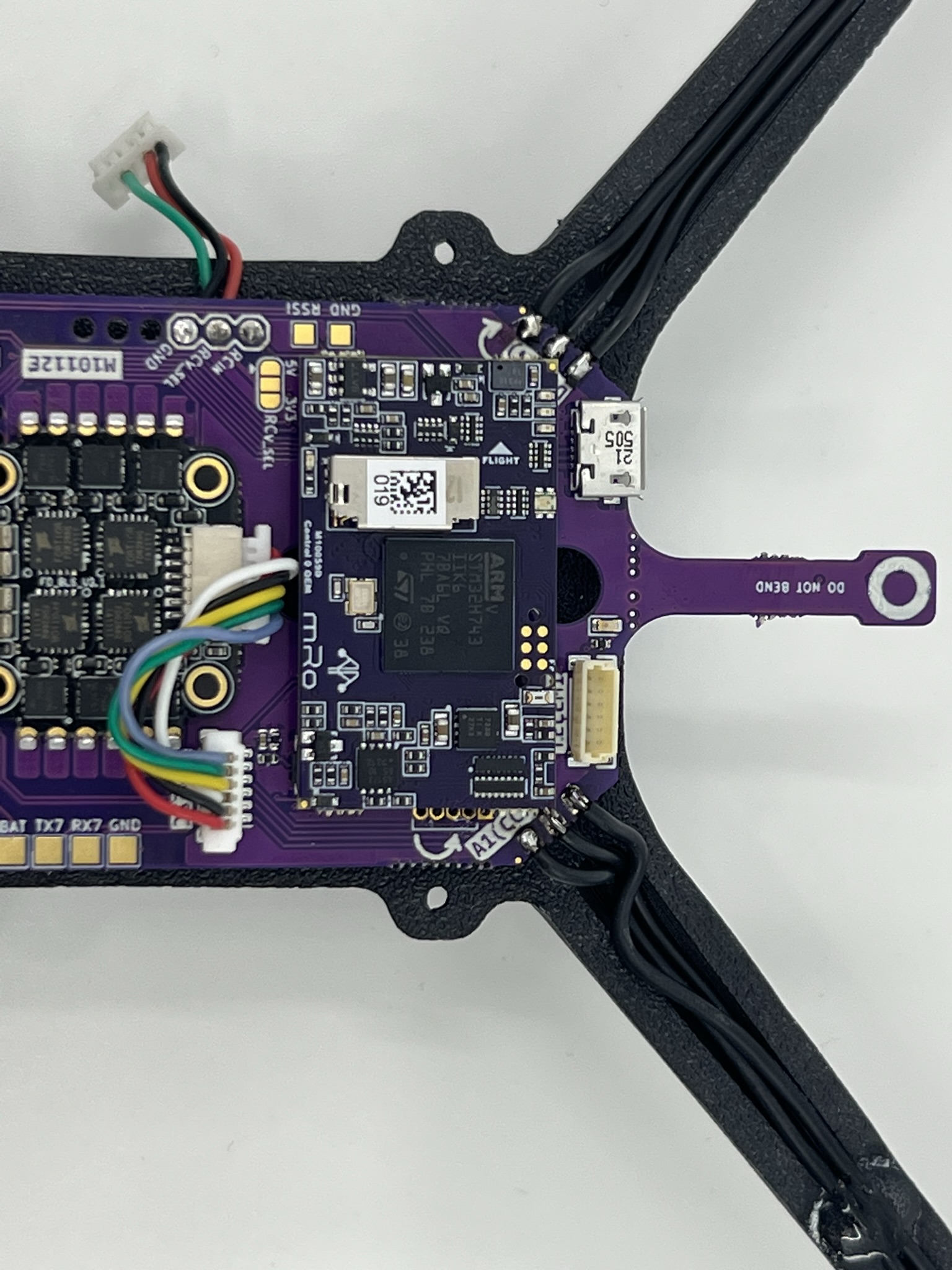
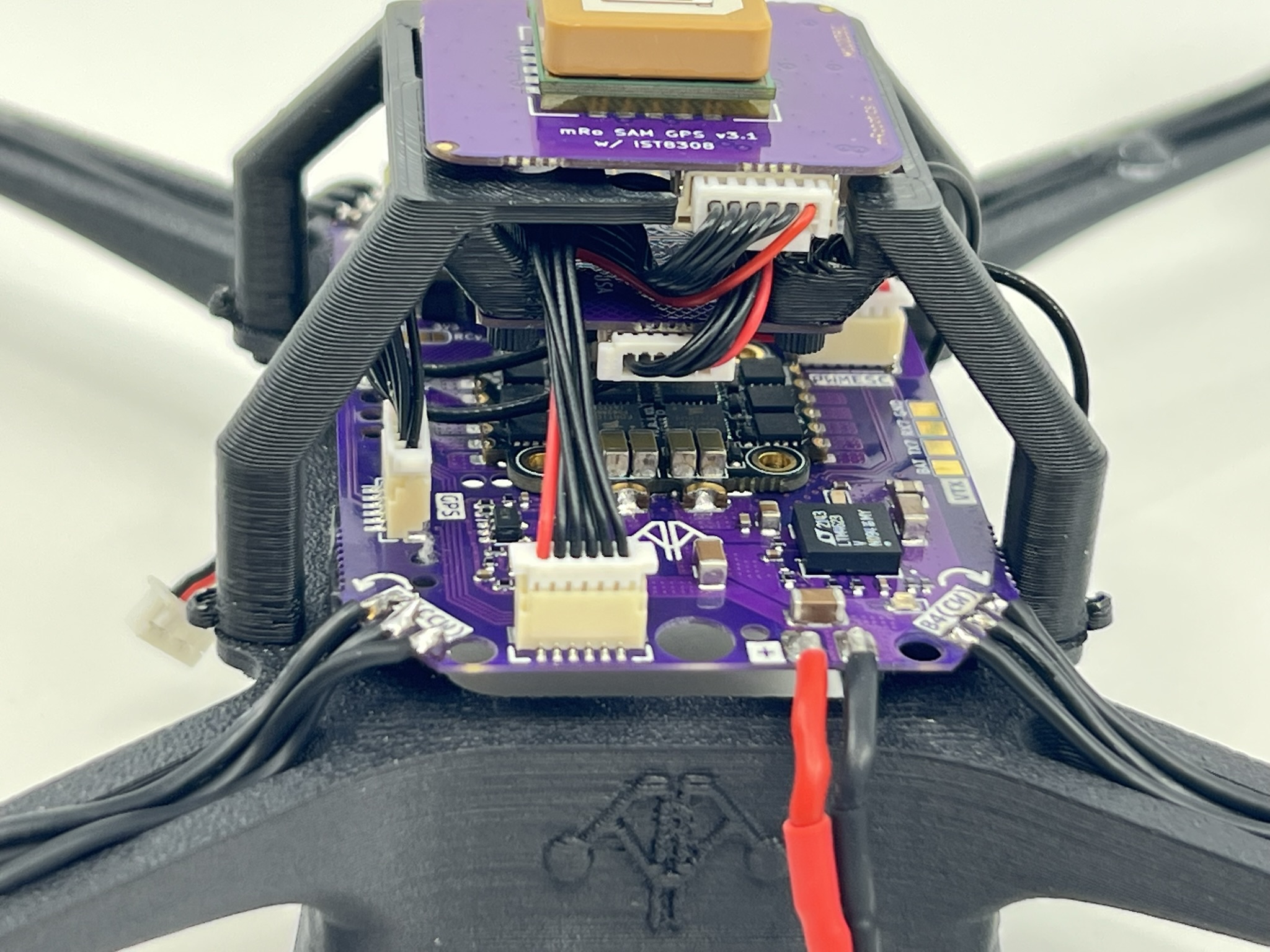
Carrier board prep
Connect ESC signal cable
Grab the colorful JST-SH 6 to JST-SH 6 cable and plug it as in the image above.This cable is generally installed during testing, so this step may not be necessary.
Remove ToF sensor protective cover
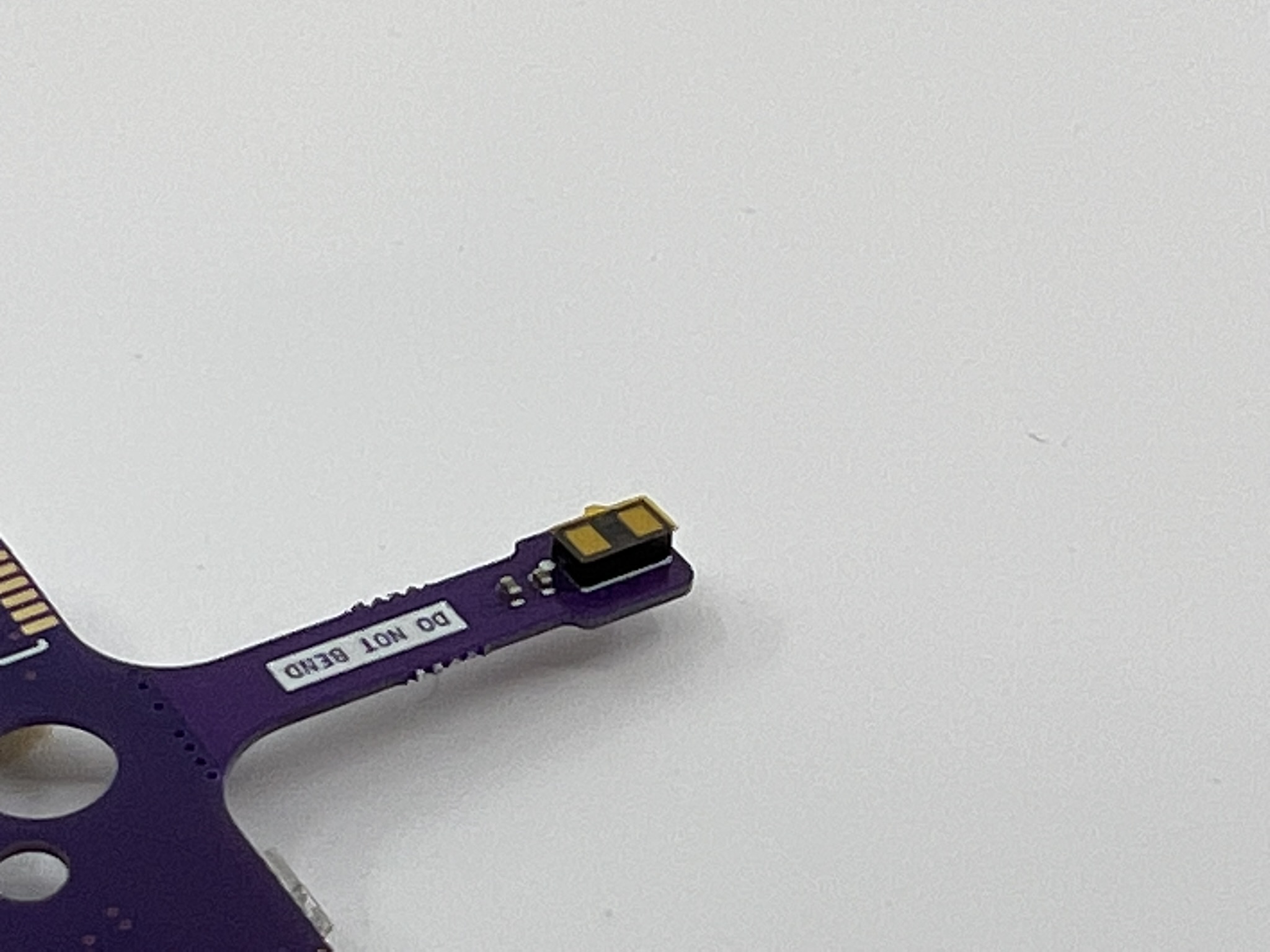
Carefully remove the yellow tape with the plastic tweezers or with your fingers.
Vibration dampers
Cut the provided vibration dampening material by half so you end up with 4 small pieces, to do so you may use a hobby knife or scissors.
Remove the plastic cover on one square and place a small drop of CA glue in the center of any square on the carrier board's back side. Press the square firmly for 10 seconds or until the square no longer slides on the surface.
Repeat for the rest of the corners.
Secure in place
Place the carrier board on its back and remove the remaining damping material adhesive cover.
 Add a CA drop on top of each dampening square.
Add a CA drop on top of each dampening square.
 Mount the carrier board onto the frame using the tabs and the side holes to align the carrier assembly. You won't see the tabs in the GIF below, but we changed the steps order so the alignment is easier.
Mount the carrier board onto the frame using the tabs and the side holes to align the carrier assembly. You won't see the tabs in the GIF below, but we changed the steps order so the alignment is easier.
 Press firmly for 30 seconds or until CA has tacked.
Press firmly for 30 seconds or until CA has tacked.
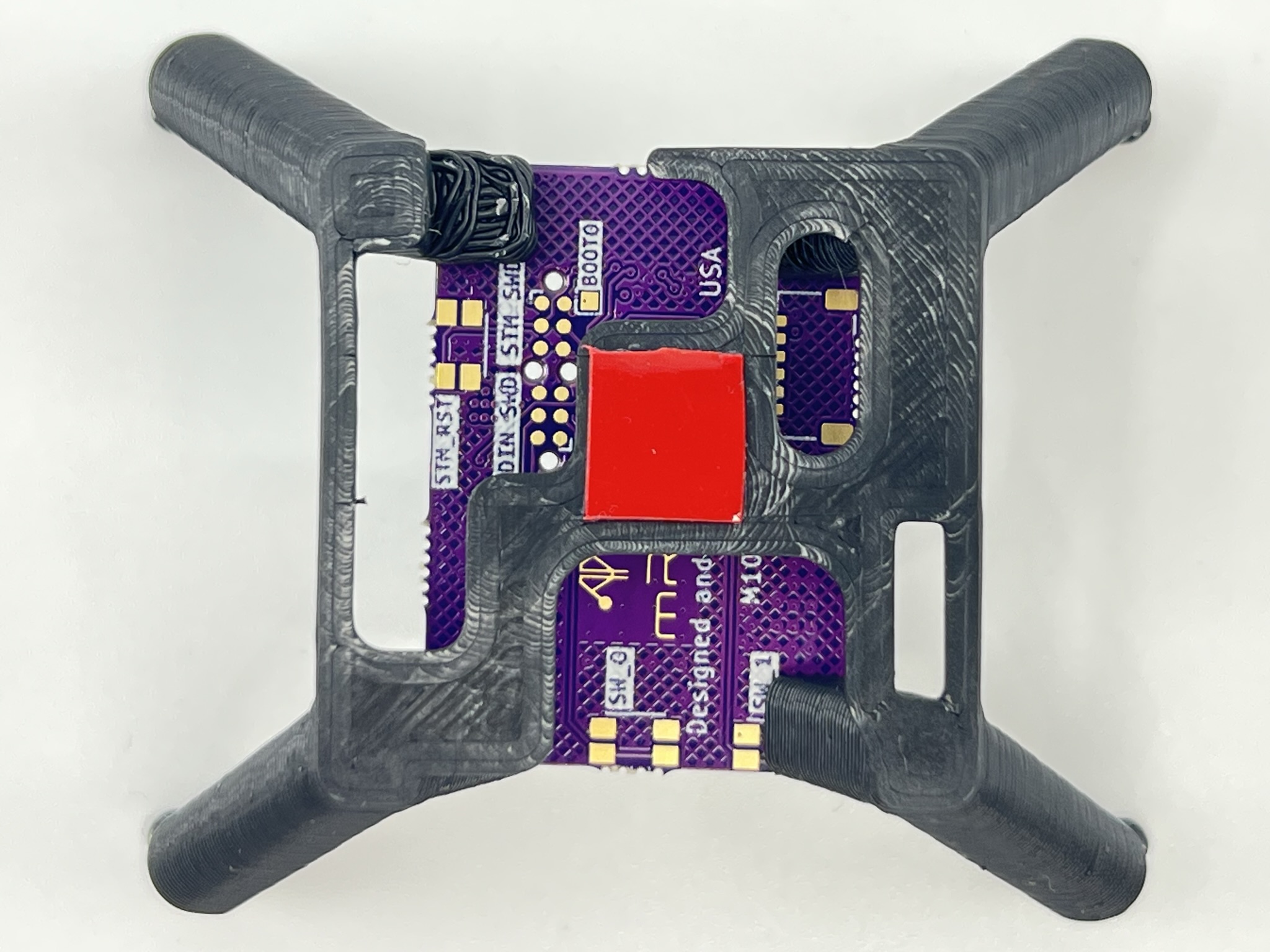
Remove break away tabs
To remove the tabs you may use any tweezers or bare fingers. Apply a torque or twisting force carefully along the axis of the dotted line, otherwise you may damage the internal layer stackup of the board.
Step 3 - Soldering
Battery connector
Solder the BT2.0 pigtail onto the battery terminals of the M10112 carrier board. The red wire should match the '+' sign in the board.
Motors
Cut the motor cable in order to reach the carrier board's motor pads, our small trick to get the wire length correct consists in pulling the wires above the carrier and cut arpund 5-6mm from the edge of the board. Then strip 3-4mm and pre-tin the ends.
Don't worry for the motor directions at this point, we will verify that using software at a later time. However if you pay attention to detail, you may skip a step later if you solder the front right [A] and rear left [C] motor wires straight (as-is) and swapping any two out of the three wires for the front left [D] and rear right [B] motors. Note: Letters in brackets refer to the corresponding motor as labeled in the carrier board pads.
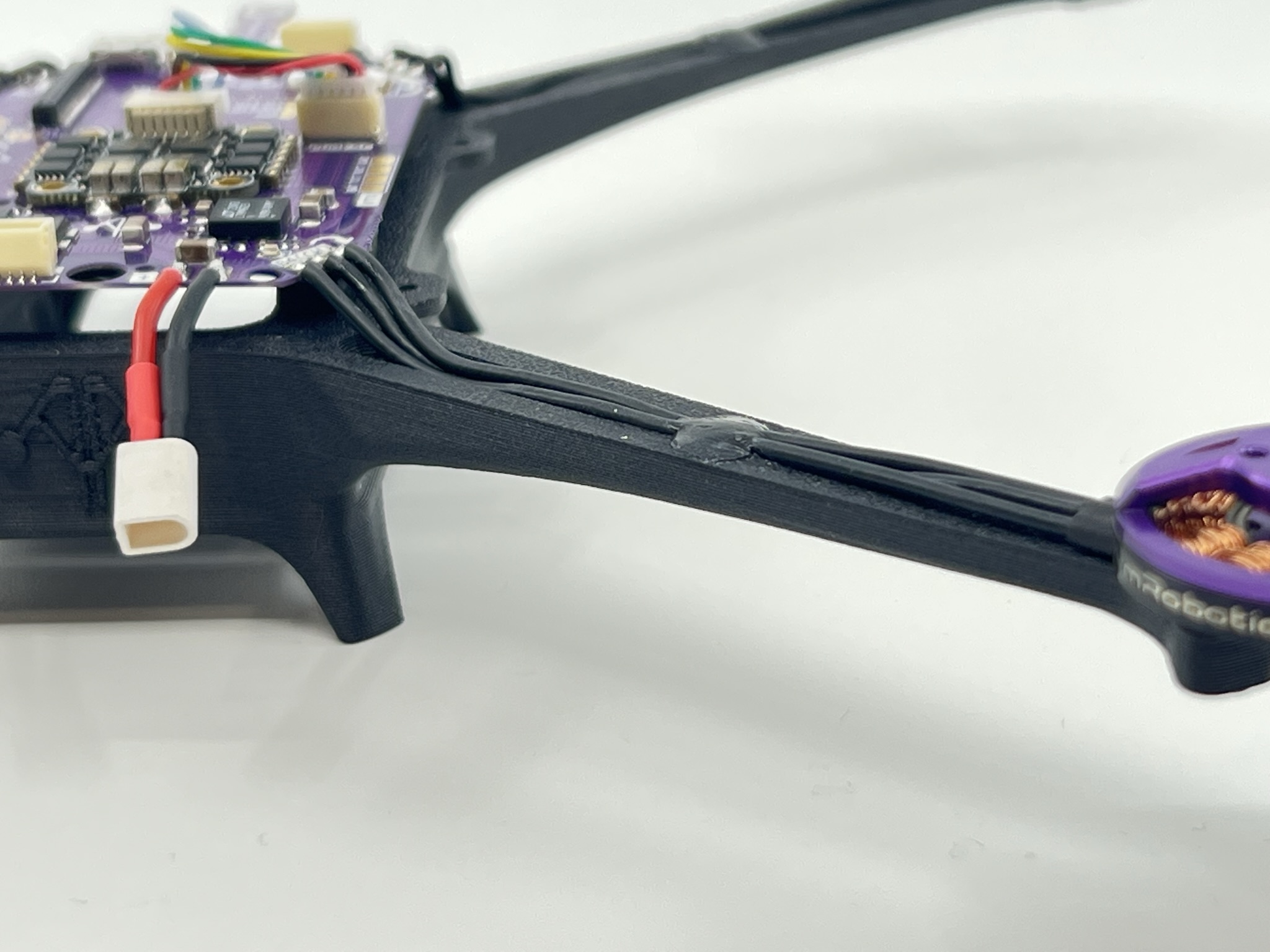
Motor cable management
This is a recommended step which may be completed with a couple of techniques. In previous versions of this guide we recommended using SuperX glue, however the CA method is faster and cheaper. However using a zip tie, hot glue or similar materials is enough. The goal is to mitigate the vibrations from the cables freely moving under the prop wash and prevent prop strikes.
Once you have all the motors soldered, gently pull the cables from the motor towards the center of the frame and apply a generous drop of CA glue at two thirds of the arm's length, making sure it covers the cables. Then apply CA accelerator and wait for it to tack.

Check the following pictures for details.
Step 4 - RF subassembly
You may put the frame assembly on the side for the next couple of steps.
DualBand Telemetry radio
We will start this section by opening the bag that contains the Dual Band telemetry radio. Please handle with care and take ESD protection measures, be particularly rigurous on this if you live in a very dry area.
Allocate the GPS Riser and grab the two 2-56x1/8" nylon hex screws to attach the M10114 Dual Band telemetry radio board to the plastic riser as pictured below.

If you are not using the Wifi telemetry radio, you may place any other type of telemetry radio, always taking into account the interference this may cause to the GPS receiver.
Connect each of the DualBand telemetry radio antenna cables to a u.Fl connector on the wifi module.

GPS Receiver
Place a small 9x9mm double sided tape square and place the GPS on top. We recommend to put smaller squares to increase the contact area, however we have found that the small square is enough.

Install autopilot board in place

Remove the Control Zero H7 OEM autopilot from its anti-static packaging taking the same precautions as in the previous step.
Place it with the arrow pointing to the left side of the carrier board, the ToF sensor protrusion is the front direction. There is only one way to couple the FC board to the carrier, since the front header has 36 pins and the rear header has 40 pins.
If for any reason you need to remove the Control Zero board, you may do so with the included plastic tweezers, using them as a lever to gently separate each connector 1-2mm at a time.
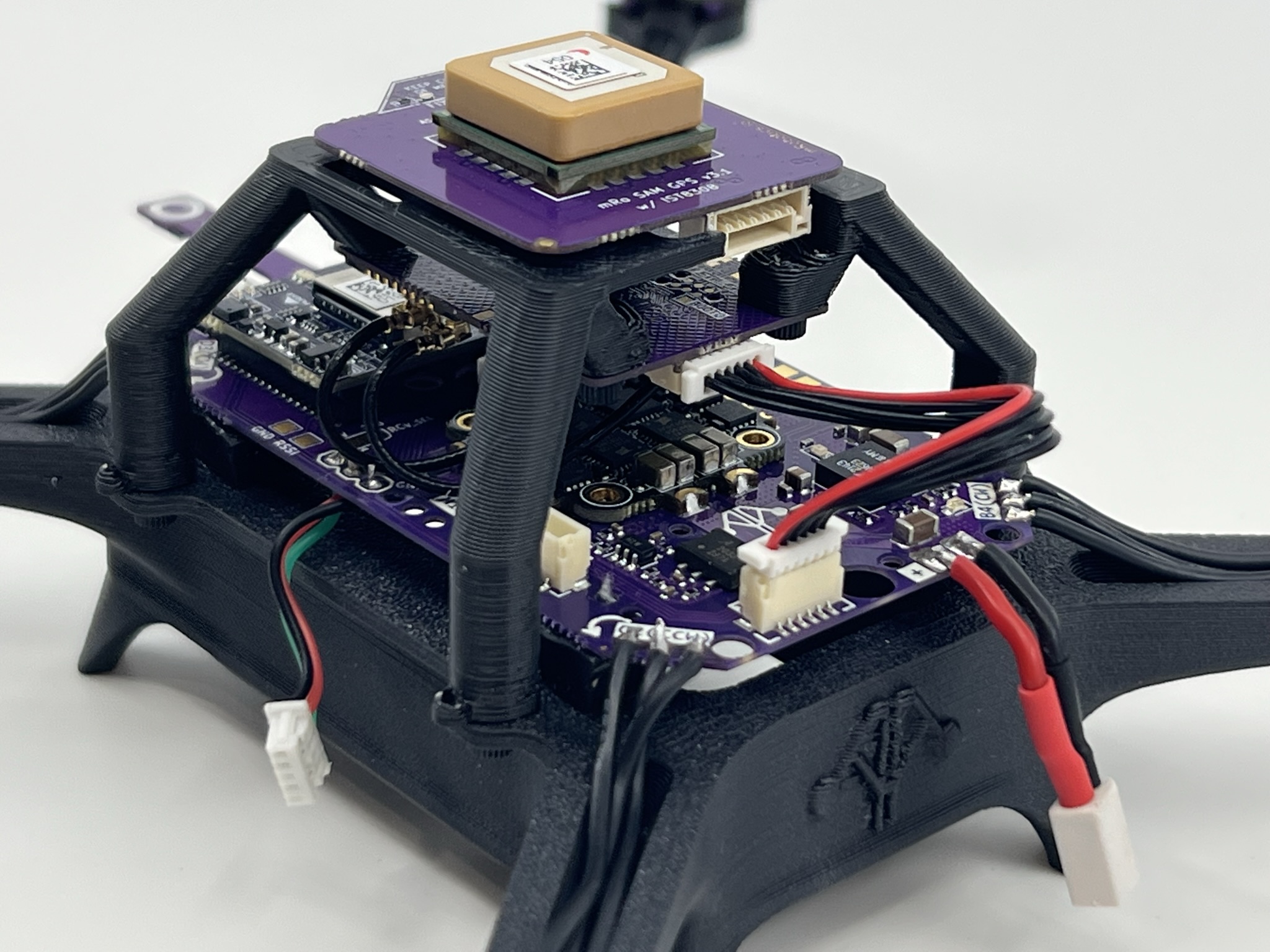
Secure RF subassembly to frame
Gently bend the antenna cables 180 degrees so you are able to place it on the right side of the frame. We suggest securing the GPS riser in place before glueing the antenna. To do so, use 4x 2-56x3/16" nylon hex screws.
See picture below for reference. Use CA glue to strengthen the bond as needed.
Cable management

Take one MRC-0292 JST-SH 6-pin to JST-SH 6-pin cable and connect it to the SERIAL labeled connector of the M10114 board (telemetry), then connect it to the TELEM2 port of M10112 carrier board. Check the previous picture for reference.

You may push the extra cable between both boards, making sure not to bend them aggressively.
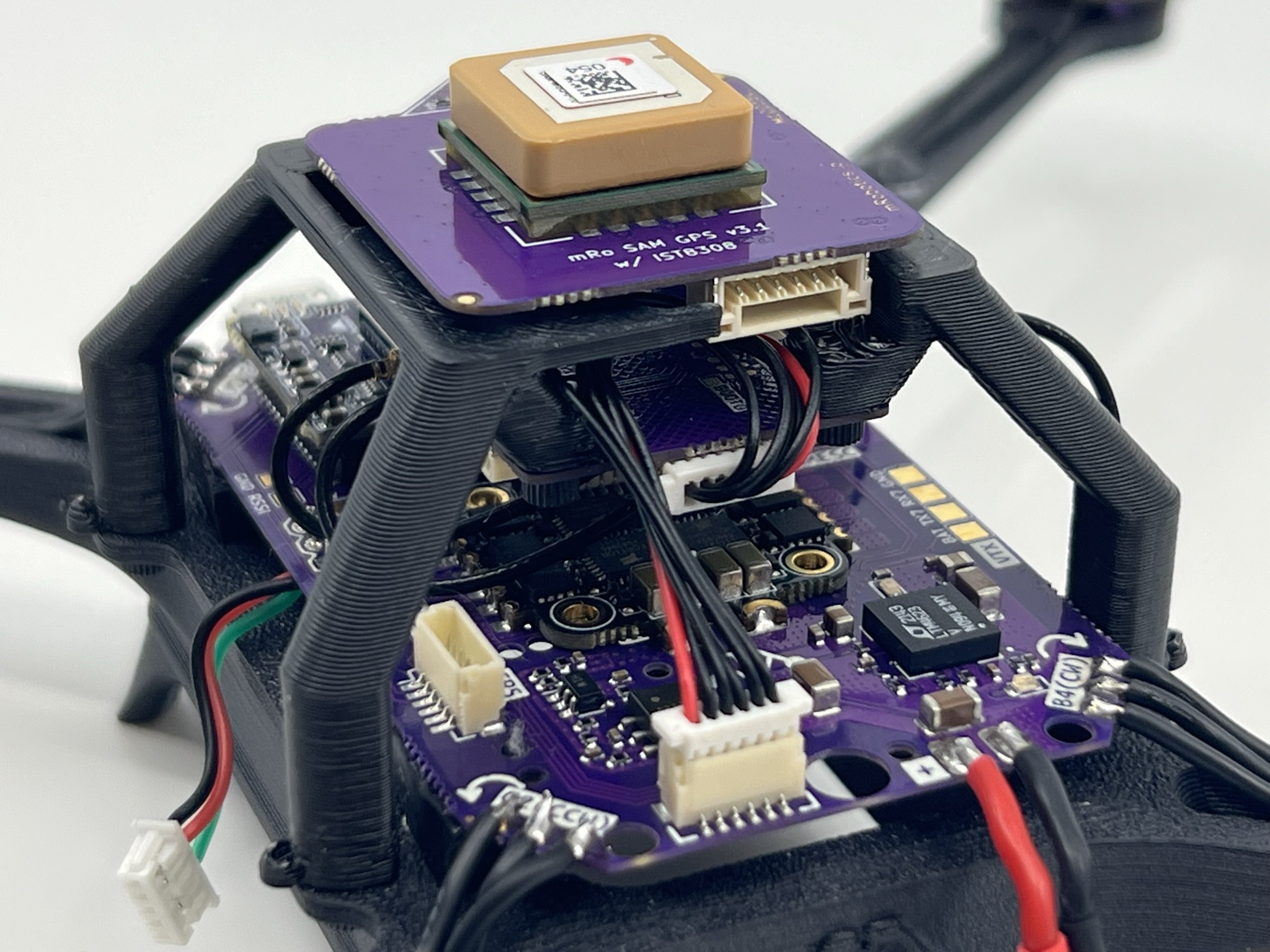
Then take one MRC-0243 JST-SH 6-pin to JST-GH 6-pin cable, connect the GH end to the GPS Receiver board and rout it through TELEM2 and between GPS and telemetry radio cable, then pull connector from the left side to connect it in the GPS labeled connector on the carrier.
Radio RX placement and antenna routing

If you haven't already, place a small double sided tape square on the antenna side of the R-XSR radio receiver. Connect its pre-soldered cable assembly, remove the adhesive protection and press firmly for 30 seconds. You may add CA glue to increase the bond strength.
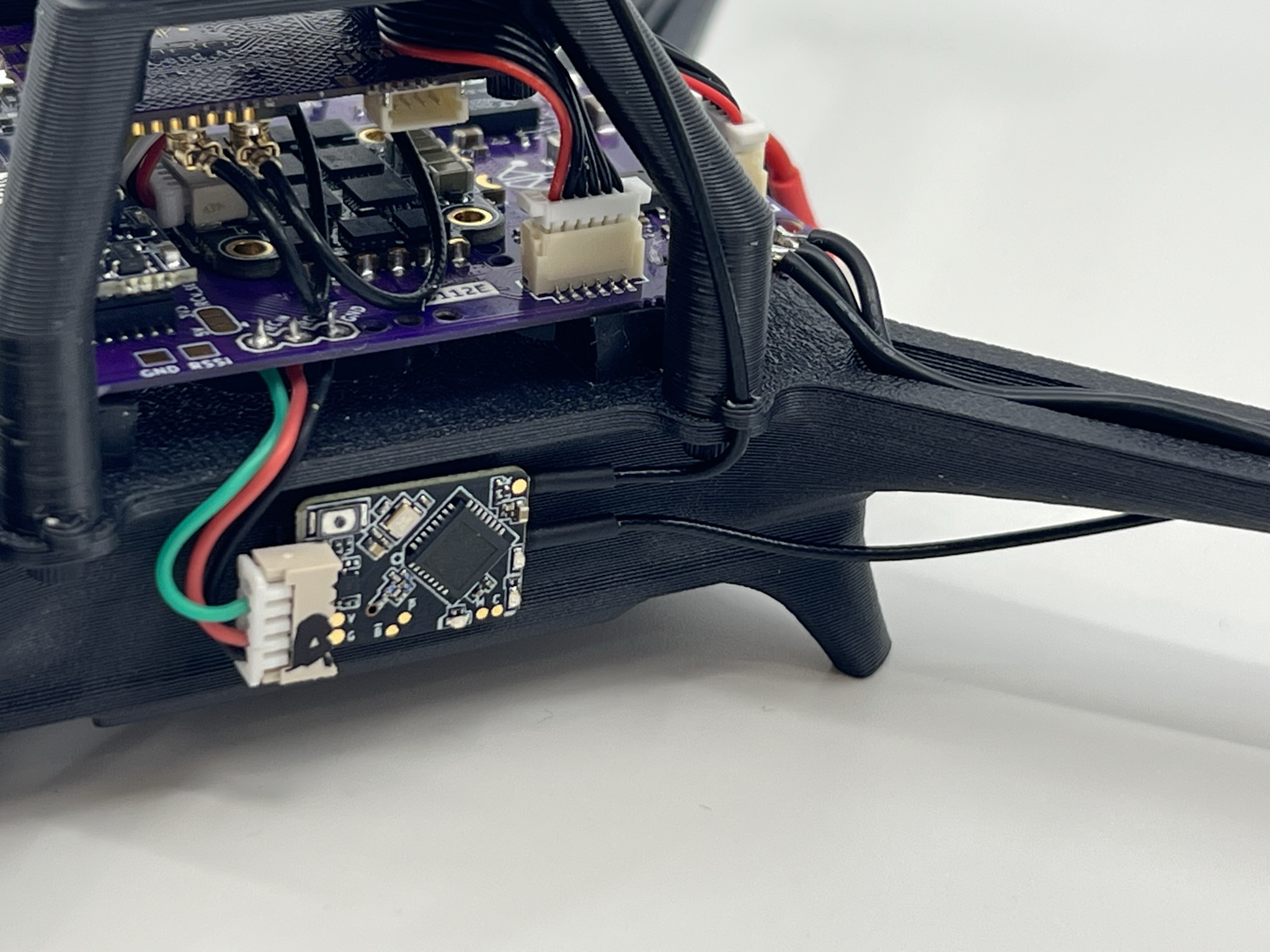
Note the suggested antenna placement. Feel free to change the routing according to your payload. We used the CA glue blob method to fix the antennas to the frame.
Step 5 - Autopilot Configuration
You will have to evaluate which flight stack you will be running in your QZKit. The mRo Control Zero H7 OEM is supported by Ardupilot and PX4, both broadly capable and stable open source projects. We provide instructions for both platforms with a minimum set of directions and parameter files.
Ardupilot
The mRo Control Zero H7 OEM board comes with Ardupilot flashed out of the box. Connect your carrier board to any computer running Mission Planner software and update to the latest stable version, AC4.3.3 at the time of writing. Please follow this guide if you need further details.
Parameter list
After updating the firmware, connect via MAVLink using 115200 as baud rate value, this setting is located on the top right corner of any screen in MP software, then click on the Settings tab.
Click the Load Parameters button and select the downloaded .param file. Click to download
Allow once you press OK button (reboot prompt) wait until the beep Parameters succesfully saved Should reconnect auto, if not just press disconnect and Connect .
PX4
Even if our board ship with Ardupilot out of the box it doesn't mean using PX4 is an advanced or complicated task. Fortunately both projects offer a common bootloader behavior which will be recognized by either software. Please do not attempt to change the bootloader. The steps to load PX4 onto the Control Zero OEM H7 board are the following:
Open QGroundControl software. Leave the carrier board unconnected.
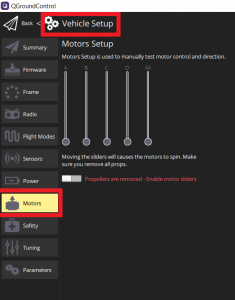
Click on the upper left corner (QGC logo), then click the Vehicle Setup button.
You should see that there are only two tabs on the left pane: Summary and Firmware. No hardware should be connected at this point!
Click on the Firmware button and proceed to connect your board.
Select the branch or firmware flavor you need to upload. Note that you can choose either PX4 Pro or Ardupilot software from the menu. If you check the Advanced settings box you may select to upload any other binary. In this case select PX4 Pro to the latest stable version
 .
.Wait until the writing and verification process ends. The board will reboot and it will start beeping afterwards.
You may now connect to it as usual from the QGC communications pane.
Parameters file
When selecting vehicle type, click on the dropdown menu for Quadrotor x and select mRo QuadZero Kit. This will load all the appropriate parameters for your vehicle. Parameters list download
Wireless telemetry link
Once you have performed the minimum configuration you may disconnect the USB cable and proceed to use the telemetry radio for the rest of the configuration steps. With your QZ powered from the battery, wait for the Status LED on the mRo DualBand Wi-Fi Telemetry Radio to turn solid green, a Wi-Fi network will be created automatically.
Then connect your device to the mRo_wifi network using controlZero as password.
Use the following configuration settings to establish communication with your GCS software:
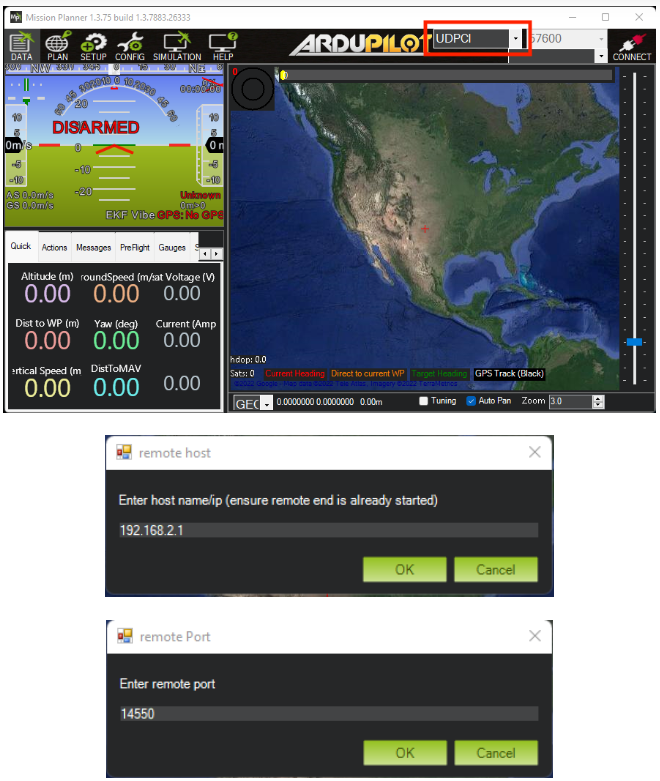
Mission Planner
Select UDPCl as the connection type. Enter 192.168.2.1 when prompted for the hostname, and 14550 as the remote port.
QGroundControl
Click on the Qground Logo on left top corner > Applications Settings > Comm Links > Add > Insert the following parameters:
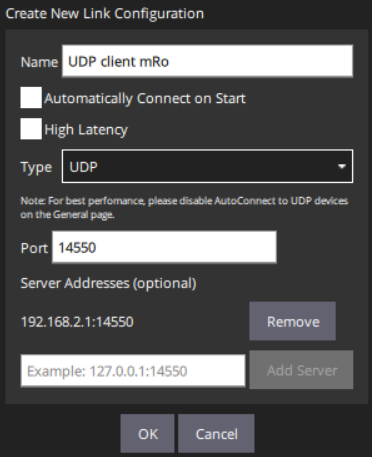
Select the newly created connection and click connect below.
More info
For more options and details about the advanced configuration of the mRo DualBand Wi-Fi Telemetry Radio, visit:
RC receiver bind procedure
Now is a good time to bind your transmitter to the installled receiver, please follow the next steps:
- Power your Quad Zero while holding the F/S button on the receiver. You should see the red and green LEDs ON. Release the F/S button on the receiver.
- Put your Transmitter in Binding mode. Each TX has its method,follow the steps based on your model.
- The LED on the receiver will flash, indicating the binding process was successful.
- Stop the "binding" beacon on the transmitter.
- Power cycle the Quad Zero.
- A green LED on the receiver indicates a successful process.
If the receiver LED is flashing red, try to repeat the process. If the problem persists, check that you have the latest version of the ACCST D16 firmware on your transmitter. You can find the newest version of the firmware compatible with the receiver in the following link:
If you have a multi-protocol transmitter and are having trouble connecting to the receiver, this link provides an easy way to download the latest firmware file for your MULTI module:
Sensor calibration, RC setup and motor direction check
Regardless of the flight stack you are running, you must perform these calibration steps to ensure a completely configured platform.
For Ardupilot:
For PX4:
Final assembly steps
Motor Direction Test
WARNING
Ensure there are no propellers on the motors at this point.
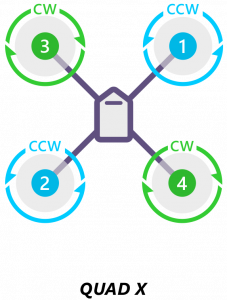
Motor directions should match the following diagram:
To do this test on Mission Planner go to: Setup > Optional Hardware > Motor Test
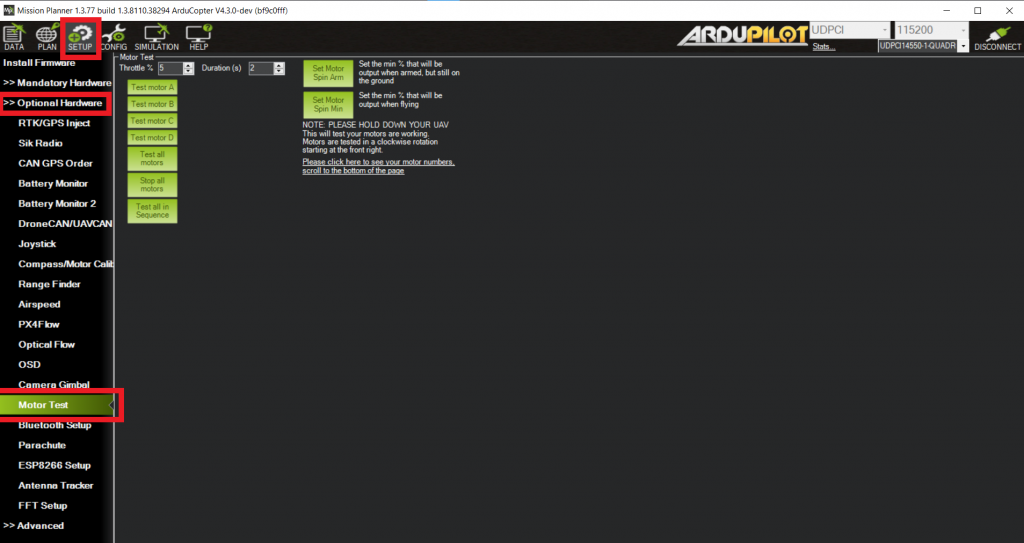
Click on each motor to verify motor spin direction and motor order. If the motor direction is wrong, you can reverse the movement by swapping two of the three ESC to motor power leads.
For more info please visit - Connect ESCs and Motors — Copter documentation.
On QGroundControl, go to Vehicle Setup > Actuators:
Please check PX4/QGC wiki for further information, note that since v1.13 the Control Allocation feature is available: - Actuator Configuration and Testing | PX4 User Guide - Use the manual output sliders to verify correct order and spin direction.
For more information about motor directions, you can follow the next link:
Props & motors subassembly
Before installing the propellers, we strongly advise to balance them statically. Even if manufacturers label the props as pre-balanced you should double and triple check this fact experimentally using a propeller balancer tool.
Install propellers
Use 2 included M2x5mm screws per motor to secure the propeller in place. Loctite is allowed for extra security. Ensure the propellers are mounted correctly according to the previous section links.
If you have issues identifying the CW vs CCW please see Recognizing clockwise and counterclockwise propellers.
Dynamic balancing
WARNING
This step involves running the motors with the propellers on the bench, if you do not feel comfortable doing so there are alternative ways of achieveing the similar results. We highly recommend doing this step if you want the best performance from your Quad Zero Kit as motors will run quieter and cooler and the estimators will be much happier if the autopilot is not vibrating violently from a poorly balanced motor-prop assembly. We would like to do this step for you to guarantee the best experience out of the box, however it is time-consuming and it would require a strict labeling for positioning the propellers on the motors thus bringing an increase in lead times and price.
Use the steps described above for verifying the motor direction to actuate each motor individually. We suggest to run it to 30% and 60% approximately, while holding the arm carefully with your fingers. Excessive vibration will be evident and counterweights should be placed until the results satisfy yourself.
Fly responsibly, safely and securely.
Happy flying!