mRo x2.1 Rev. 2
Background/History of the Product:
The mRo X2.1 Rev. 2 is the reduced version of Pixhawk1 with better sensors and more flexibility. This board will “work out of the box” with PX4 and Ardupilot.
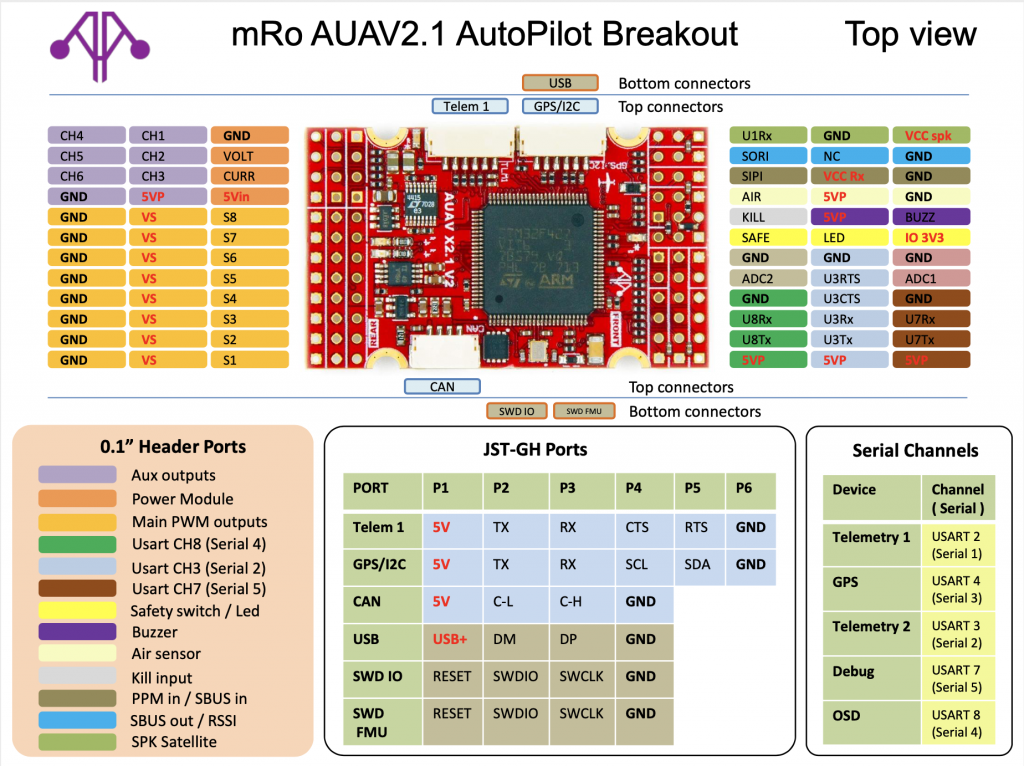
Pinouts
Specifications
| Specifications | mRo x2.1 Rev 2 |
|---|---|
| Main Processor | 32-bit STM32F427 Cortex M4 core with FPU rev.3 168 MHz |
| IO Processor | 32-bit STM32F103 failsafe co-processor |
| RAM | 256 KB RAM |
| Flash | 2 MB FRAM |
| Crypto / Hash Processor | No |
| Accelerometers / Gyros / Mags | 2 / 2 / 1 |
| Sensors | Invensense/TDK ICM-20602 (6DOF) Invensense/TDK MPU-9250 (9DOF) |
| Sensors – Dampened | None |
| Internal Magnetometer | AK8963 inside MPU-9250 |
| Barometer | MEAS MS5611 |
| Interfaces and Protocols | 5x UART (serial ports)[2x with HW flow control, 1x CAN]. 1x PPM sum signal 14x PWM/servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible) 1x RSSI (PWM or voltage) input 1x I2C (Via GPS port) 1x SPI 2x ADC inputs Supported RC input protocols: Spektrum DSM / DSM2 / DSM-X® Satellite compatible input up to DX8 (DX9 and above not supported). Futaba S.BUS® compatible input and output. |
| Connectors | -JST GH series connectors -Servo Header (optional) -External MicroUSB |
| Pin Headers | Optional |
| Conformal Coating | Available |
| Extended Testing and Burn In | No |
| Custom Carrier Board Support | Yes |
| LED | Yes |
| Dimensions | Width: 30.7mm (1.21”) Length: 51.2mm (2.02”) |
| Weight | 15.14g (0.53 oz) |
| Mounting Holes | 30.5mm x 30.5mm (1.18″x1.18″) |
| Protector Case | Optional |
| Typical Platforms | -Multirotor -Rover -Fixed-Wing -Boats -Submarines -VTOL -Automatic Tractors -Others |
3D Model
Firmware
The mRo X2.1 Rev 2. is compatible with the following firmware:
ArduPilot
- ArduCopter 4.x
- ArduPlane 4.x
- ArduRover 4.x
PX4
- PX4 V1.8
Normal Usage Guide
All connectors follow the Dronecode connector standard. Unless noted otherwise, all connectors are JST-GH.