Location One - M10070 
WARNING
Unmaintained site notice. Information may be outdated. Please visit 3DR documentation instead.

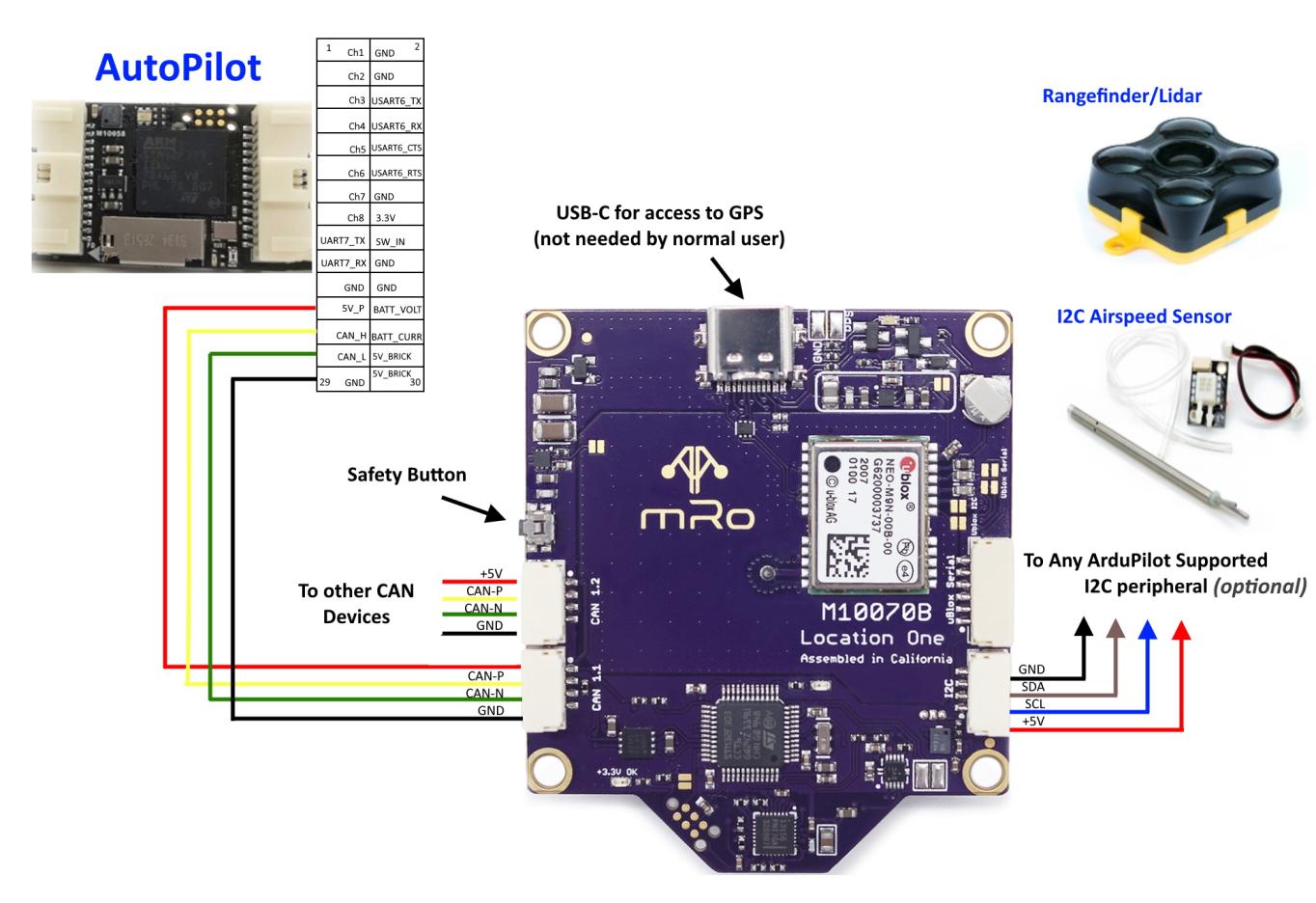
The mRo Location One is a multi-constellation GNSS powered by the latest uBlox M9N module and the advanced RM3100 compass.
Compared to old generation GNSS+Compass modules, this board incorporates a robust Controller Area Network [CAN] bus based on the ArduPilot APPeriph CAN peripheral firmware.
This CAN port allows us to transmit all sensor data with just two wires, on a single bus with high noise tolerance. It has a RGB Status LED and “Arm” safety button. Designed for all UAVCAN compatible platforms.
Location One is not just a u-Blox chip populated on a purple reference GNSS board design. Patch antennas won’t work by themselves, they require a proper ground plane to achieve maximum performance and assure good reception at any angle. With the lack of a proper antenna, the GNSS module will not achieve peak performance (or work at all), as would happen with any RF system. The Location One ground plane and RF circuitry might look the same as other options, but we work very hard to give you that extra ~15% performance.
WARNING
Unmaintained site notice. Information may be outdated. Please visit 3DR documentation instead.
Warranty and Warnings
The mRo Location One is a powerful yet delicate device. Handle with care and avoid touching the metal cap antenna, or your static discharge might damage the internal LNA. Do not cover it with tape or another insulator if you are not sure of its properties. This might change the antenna “tuning” resulting in lower performance.
Also, the 3 magnetic coils mounted on the top-front of the units are delicate. They purposely have little solder paste to avoid excess “tilt”, resulting in some reading inaccuracies of the compass. Any strong impacts will definitely separate them. The tallest coil (z-axis), has a lot of what is known in physics as “arm” due to the unusual height, so even if extra solder is present, it is relatively easy to rip the pads off. Use this precision instrument with care. If you break one, read our troubleshooting below.
Innovations
-> Our first GPS to have a nearly “perfect” top plane, with no holes or artifacts that can alter the antenna reception pattern (except the USB-C holes).
-> The first time we have used dual 3.3V regulators. One dedicated to the microcontroller and not critical sensors/peripherals, and one 3.3V just dedicated to the GPS engine, as close as possible to reduce noise.
-> Ground separations: the PCB is a multi-layered device, which allows us to separate the grounds from the GPS engine and the “rest” as much as possible, to reduce noise affecting the very weak GNSS signals.
-> We are the first to “bump” the GPS shape and expose the compass coils away from the main PCB area. This has two advantages: the first is that it keeps the GPS ground plane intact, and the second is that it positions the very sensitive magnetic coils away from the internal unit noise with a “clear view” for better performance. Also, notice that the area has almost no copper.
Quickstart guide
Ardupilot Parameters
On the latest version of Mission Planner, set the following parameters:
| PARAM | VALUE |
|---|---|
| CAN_P1_DRIVER | 1 |
| CAN_P2 _DRIVER | 0 |
| GPS_TYPE | 9 UAVCAN |
| GPS_TYPE2 | 9 UAVCAN (Optional) |
WARNING
Make sure the DroneCAN compass driver is not disabled (UAVCAN should be unchecked).
If your flight controller has more than 3 internal compasses, you should disable the least important one:
| PARAM | VALUE |
|---|---|
| COMPASS_TYPEMASK | UAVCAN (Unchecked) |
Connect your mRo Location One to your flight controller via CAN and Reboot.
Specifications
| Specifications | mRo Location ONE W/ Barometer & Compass |
|---|---|
| Ground Plane | 50mm x 50mm |
| Constellations | USA (GPS), Russia(GLONASS), Europe (Galileo) & China (BeiDou). |
| Compatibility* *See full compatibility chart for supported flighstack versions | RM-3100 supports: both PX4 and Ardupilot |
| RTK ready | No |
| USB Port | Yes (Type C) |
| CAN ready | Yes |
| Minimum and Maximum Operating Temperature | -20 ~ 80 °C |
| LED | Yes |
| Dimensions | 50mm x 50mm x 7mm |
| Weight | 20.26 grams (.71 oz) |
| Mounting Holes | 3.2mm |
| Case | Optional |
| Connectors | -2x 4-Pin JST-GH (CAN) -1x 4-Pin JST-GH (I2C) -1x 6-Pin JST-GH (Ublox UART) |
| Includes | -1x mRo Location One -2x 6-pin JST-GH cables -1x USB -C cable |
| Typical Platforms | -Multirotor -Rover -Fixed-Wing -Boats -VTOL -Automatic Tractors -Others |
| Other Features | The best compass system available at the moment for lightweight platforms *RGB LED driver (NCP5623) *PPS pad for easy access *On-board safety switch |
3D Model
Normal Usage Guide
Advanced Usage Guide
Enable RGB
| PARAM | VALUE |
|---|---|
| NTF_LED_TYPE | UAVCAN (Only if you want the RGB enabled) |
Enable I²C Airspeed
To enable an I²C airspeed, first go to your full parameter list via Mission Planner and set:
| PARAM | VALUE |
|---|---|
| ARSP_TYPE | 8 UAVCAN |
| ARSP_USE | 1 |
| ARSP_BUS | 0 |
Then you must access your mRo Location One CAN parameters and follow those steps:
- Mission Planner
- Initial Setup
- Optional Hardware
- UAVCAN
- SLCan Mode CAN1 (or 2)
- Parameters.
1 minute later inside the CAN Parameters list, change the following:
| PARAM | VALUE |
|---|---|
| ARSP_TYPE | 1 |
Write the parameters mentioned and reboot.