mRo X2.1-777
The mRo X2.1-777 is the reduced version of Pixhawk1 with better sensors and more flexibility. This board will “work out of the box” with PX4 and Ardupilot. Populated with the extremely powerful STM32F777 microcontroller.
Specifications
| Specifications | mRo x2.1-777 |
|---|---|
| Main Processor | 32-bit STM32F777 Cortex M4 core with FPU 216 MHz |
| IO Processor | 32-bit STM32F103 failsafe co-processor |
| RAM | 512 KB RAM |
| Flash | 2 MB FRAM |
| Crypto / Hash Processor | Yes |
| Accelerometers / Gyros / Mags | 2 / 2 / 1 |
| Sensors | Invensense/TDK ICM-20602 (6DOF) Invensense/TDK MPU-9250 (9DOF) |
| Sensors – Dampened | None |
| Internal Magnetometer | AK8963 inside MPU-9250 |
| Barometer | MEAS MS5611 |
| Interfaces and Protocols | 5x UART (serial ports)[2x with HW flow control, 1x CAN]. 1x PPM sum signal 14x PWM/servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible) 1x RSSI (PWM or voltage) input 1x I2C (Via GPS port) 1x SPI 2x ADC inputs Supported RC input protocols: Spektrum DSM / DSM2 / DSM-X® Satellite compatible input up to DX8 (DX9 and above not supported). Futaba S.BUS® compatible input and output. |
| Connectors | -JST GH series connectors -Servo Header (optional) -External MicroUSB |
| Pin Headers | Optional |
| Conformal Coating | Available |
| Extended Testing and Burn In | No |
| Custom Carrier Board Support | Yes |
| LED | Yes |
| Dimensions | Width: 30.7mm (1.21”) Length: 51.2mm (2.02”) |
| Weight | 15.14g (0.53 oz) |
| Mounting Holes | 30.5mm x 30.5mm (1.18″x1.18″) |
| Protector Case | Optional |
| Typical Platforms | -Multirotor -Rover -Fixed-Wing -Boats -Submarines -VTOL -Automatic Tractors -Others |
3D Model
Firmware
The mRo X2.1-777 is compatible with the following firmware:
ArduPilot
- ArduCopter 4.x
- ArduPlane 4.x
- ArduRover 4.x
PX4
- PX4 V1.8 (and further versions)
Normal Usage Guide
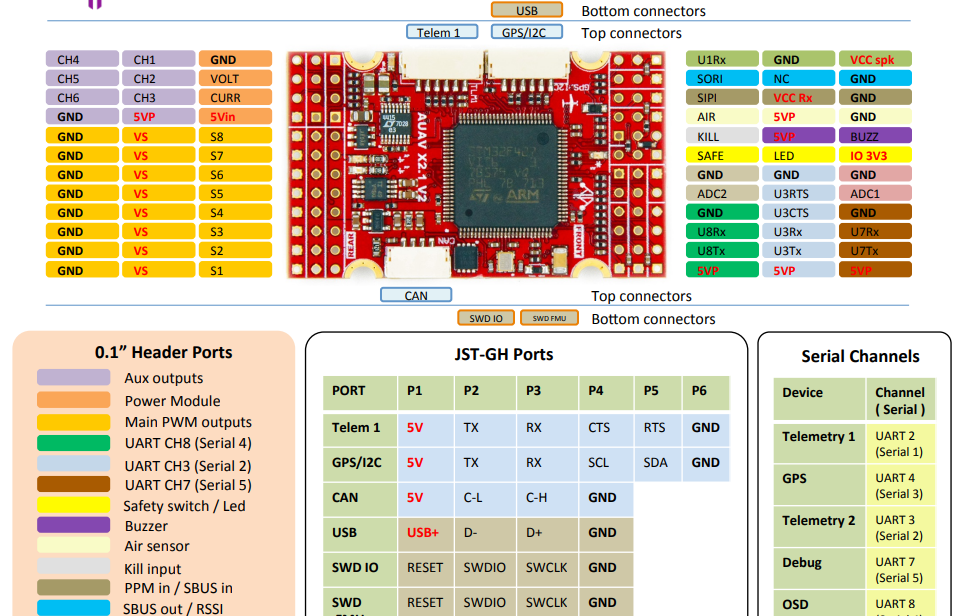
Pinouts
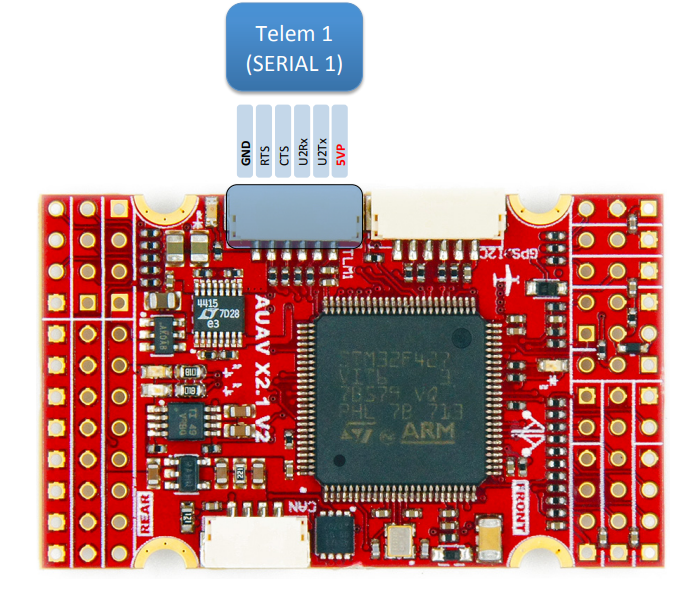
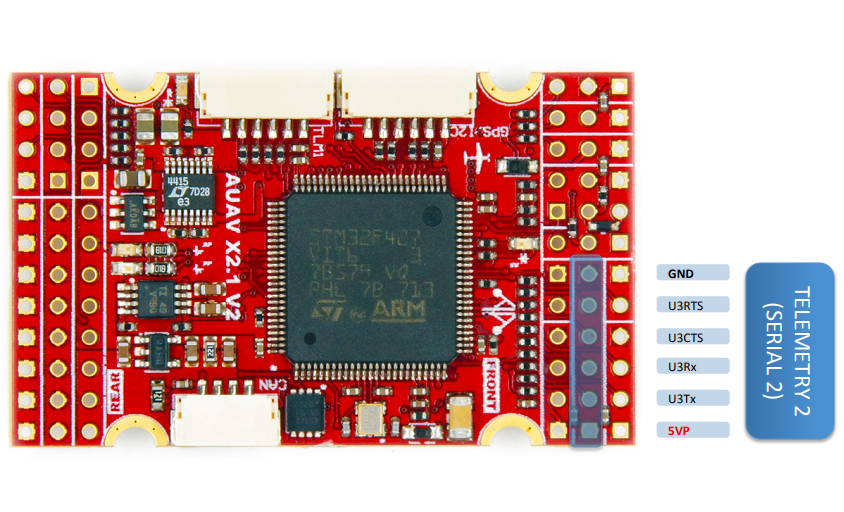
Telemetry Ports
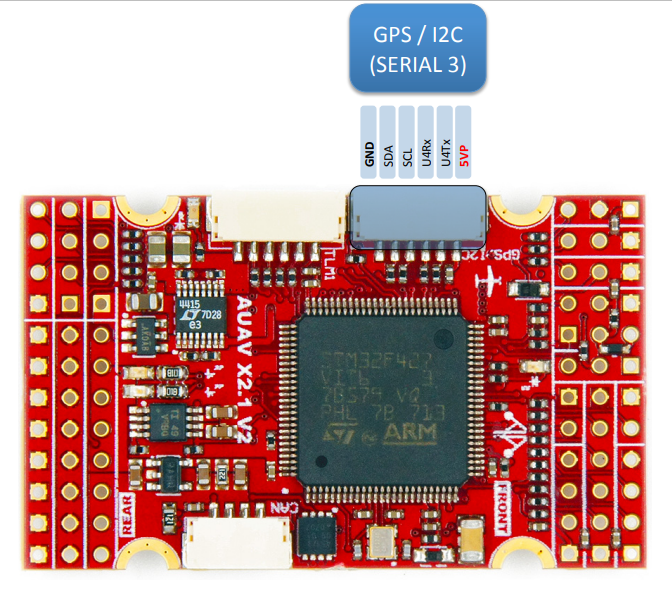
Basic GPS Port
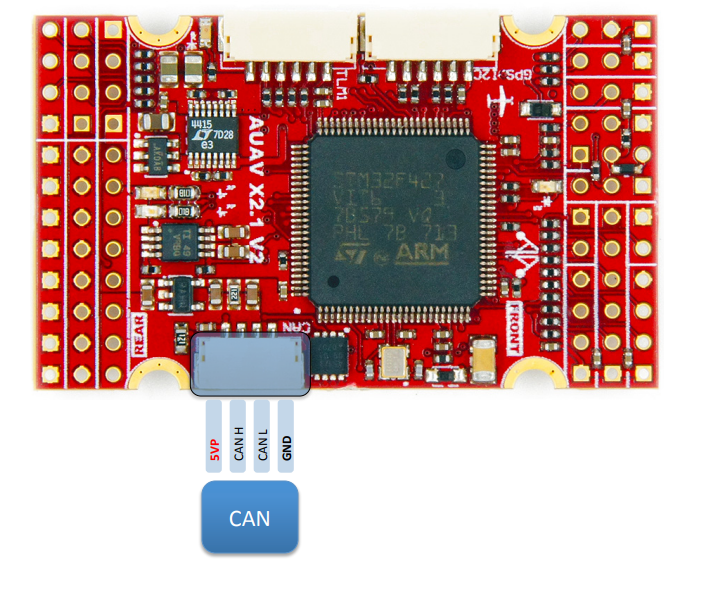
CAN Port
I²C Port
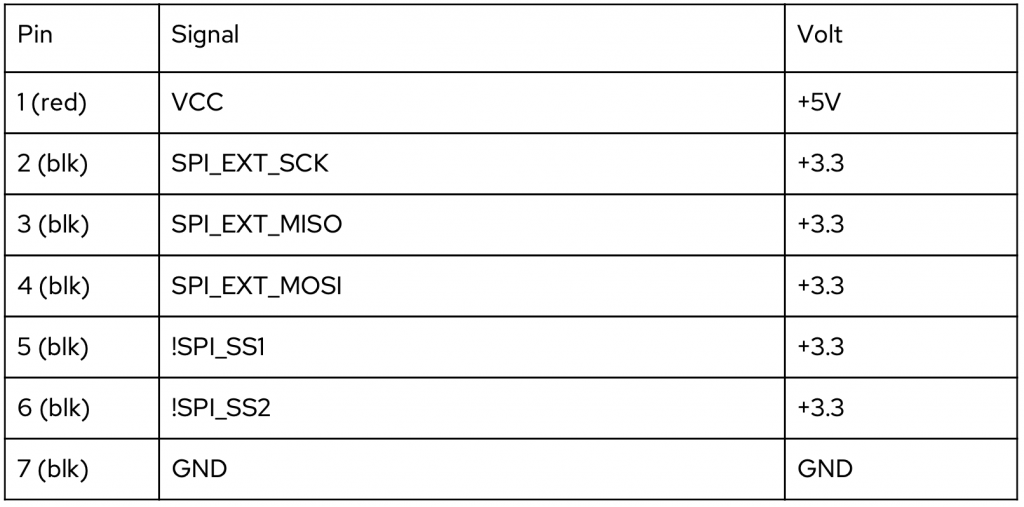
SPI Port
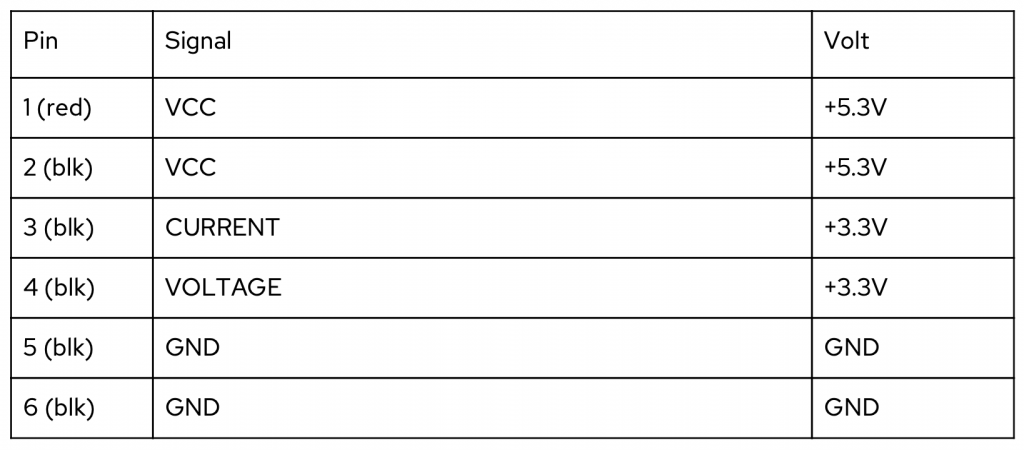
Analog Power Port